

The Lego Group have announced the new Mindstorms EV3 programmable brick at the Consumer Electronics Show in Las Vegas today. It’s an exciting development in the world of amateur robotics, as the new kit is eagerly anticipated by Lego fans around the world.
Continue reading »

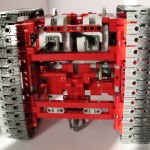
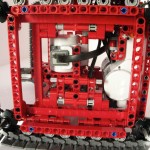
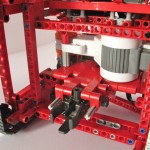
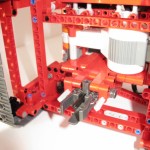
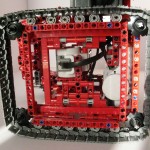
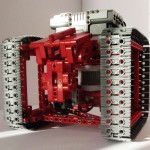
My Queboid robot has been around for a while, but for the World Robot Olympiad event in Abu Dhabi this year I decided to add a Zamor sphere shooter to the basic model. I swapped out the power function motors to use NXT motors. The idea was that kids could drive the robot using Philo’s joystick design communicating over Bluetooth from the remote to the NXT in the Queboid.
Building Instructions
• View step-by-step Queboid Shooter Building Instructions.pdf as a PDF file (28.6 MB download)
• View a gallery of images with step-by-step instructions.
• Download the QueboidShooter.ldr file to view in LDView or MLCad.
• The building instructions remote control for Queboid is from Philo’s joystick.
Programming
The Queboid control program is written in NXC. You need two NXTs; one is mounted on the Queboid robot, and the other is in the joystick unit. The joystick needs to connect to the Queboid using Bluetooth and is the master.
qbcontrol.nxc is the source code that runs on the control joystick.
qbslave.nxc is the source code that runs on the Queboid robot.
Operation
To operate the Queboids follow these steps:
- Turn on the NXT on the joystick and the Queboid.
- Enable Bluetooth on both NXTs.
- On the joystick search for the Queboid NXT in the Bluetooth menu.
- Connect to the Queboid from the joystick using Bluetooth.
- Start the qbslave program on the Queboid.
- Start the qbcontrol program on the joystick.
- Center the joystick and press the fire button.
- Push the joystick forward to drive forward, and left/right to turn. Press the joystick button to fire a ball.

















Video
I brought the Queboid Shooters to the World Robot Olympiad in Abu Dhabi. You can watch a short video of them in action below:

You might remember the original Lego Street View Car I built in April. It was very popular at the Google Zeitgeist event earlier this year. I wanted to re-build the car to only use the Lego Mindstorms NXT motors. I was also keen to make it look more….car-like. The result, after 4 months of experimentation, is version 2.0 of the Lego Street View Car.
This Street View Car was showcased at the World Robot Olympiad event in Abu Dhabi in November 2011.


I made some modifications to my LEGO Street Sweeper to bring to the LEGO World Zwolle event. The previous version lacked a finished body, so I added a rear body enclosure and a cab frame to make it more realistic.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}